ここではシステムの数学モデルについて説明していきます。システムとは前回も説明しましたが、フィードバック制御系全体のことを指しています。
数学モデルと小難しい言い回しを使っていますが、簡単に言うと入出力関係を数学を使って表す方法です。数学的に表現するためにシステムの前提条件があるので、それをまず紹介します。
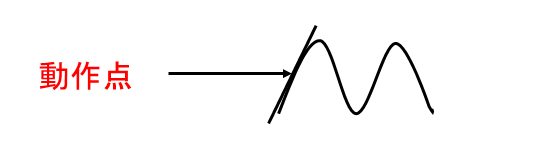
システムの前提条件として、線形時不変システムを考えます。これは後程詳しく説明します。通常、制御対象は非線形で、時変なシステムです。しかし、このままでは非常に複雑で、
取り扱うのは困難なため、動作点(operating point)といわれる所の周りで、システムを固定し、制御対象を線形で、時不変なシステムとして取り扱います。